|
I completed my MS in Robotics from Worcester Polytechnic Institute in May 2023.
I am currently working at Brooks Automation in the domain of Computer Vision. During my second year at WPI, I interned at Honda Research Institute, BrainCorp, and FieldAI, focusing on ML, perception, and autonomy. I also worked as a Visiting Research Assistant at the DICE Lab at SDSU.
I’m open to new opportunities and interested in roles related to Perception, AI/Deep Learning, and System Software. |

|
Email / LinkedIn / Github / Google Scholar
Work Experience |





Open Source Contributions |

|
Jan 2026 - Present GitHub Repository Contributing to NVIDIA's open-source CV-CUDA library, a GPU-accelerated computer vision library optimized for AI workflows
|
Innovation Disclosures & Patents |
|
Kunal Nandanwar, Karina Thrasyvoulou (Provisional Patent) |
|
|
Kunal Nandanwar, Hifza Javed, Nawid Jamali (Submitted; with USPTO) |
Conferences & Proceedings |

|
Kunal Nandanwar, Prof. Reza Akhavian Paper submitted at Creative Construction Conference 2024 Presented a novel approach to optimize scan planning in 3D indoor spaces using a Building Information Modeling (BIM)-based autonomous scan planning framework with a quadruped walking robot |

|
Animesh Jain, Satyam Bhaskar, Kunal Nandanwar, Prof. H.O. Bansal Intelligent Communication, Control and Devices, 2020 Springer Proposed a lab prototype of a PID control tuned, self-balancing bike that can be further extended to autonomous bike with path and obstacle detection to travel using global positioning system |
|
|
Kunal Nandanwar, Prof. B. K. Rout Advances in Industrial Machines and Mechanisms, 2021 Springer Attempted to determine an optimum path, given the start and end points of the end-effector of a virtual delta robot, and to minimize the energy consumed by the motors to drive the platform. In addition, it synthesizes a configuration that consumes the least energy while traversing a given path |
|
|
Kunal Nandanwar, Divya Rathore, Prof. R. Gupta Waste management as economic industry towards circular economy, 2020 Springer Presented a design of technological system to recycle used absorbent hygiene products and obtain valuable secondary raw materials in a completely eco-friendly manner |

|
Kunal Nandanwar, Divya Rathore, Animesh Jain 11th National Conf. & Exhibition on Aerospace & Defence Related Mechanisms By Indian Space Research Organization (ISRO), 2018 Website: Aerospace and Related Mechanisms Symposium 2018 GitHub Presented a novel concept and working mechanism of spanwise adaptive wings for an unmanned aircraft with retractable configuration for maneuvering in narrow spaces, and extended configuration for enhanced gliding and increased maximum speed as needed Sole undergraduate team selected to present a paper at the conference, distinguished among seasoned scientists from ISRO |
Research Assistant |

|
Sept 2023 - Present Project Slides Worked on an automated framework to determine the optimal scan planning for a stop-and-go mapping procedure with a quadruped walking robot based on BIM |

|
Jan 2023 - Aug 2023 Project Slides 1 Project Slides 2 Video Demo Worked in collaboration with Eversource Energy on autonomous robot that can patrol cables for deterring birds from congregating near utility assets Deployed custom trained YOLO model on Jetson Nano powered robot; integrated camera & Time of Flight sensors using ROS Noetic |
|
Jan 2022 - May 2022 Project Slides Defined a 2D and 3D planner for In-Hand Manipulation Platform on External Surfaces using A* algorithm with Geodesic and Euclidean distances as heuristic |
|
|
Aug 2018 - Dec 2018 Project Slides Developed the concept of an Autonomous Bike, with the aim to reduce accidents & achieve better control on uneven terrain Built simulation model & small scaled prototype withstanding upto +/- 13 degree disturbance using Gyroscope & PID controller Backed by a renowned Indian electric vehicle manufacturer to develop full-fledged self-balancing electric bike's model |

|
Jan 2018 - May 2018 Focused on combining vision-based navigation approaches with the notion of modeling of obstacles and classifying them as per their type, pose and spatial measurements Evaluated performance of proposed algorithm using criteria like the total number of nodes explored and total path cost for all the cycles |
Relevant Projects |
|
GitHub Link Reconstructed a 3D scene from a set of images with different viewpoints using NeRF |

|
GitHub Link Developed a code that reads a depth image and utilizes camera parameters to deproject it into a point cloud, filters out the table from the point cloud, and projects the remaining objects onto a top-down depth map |
|
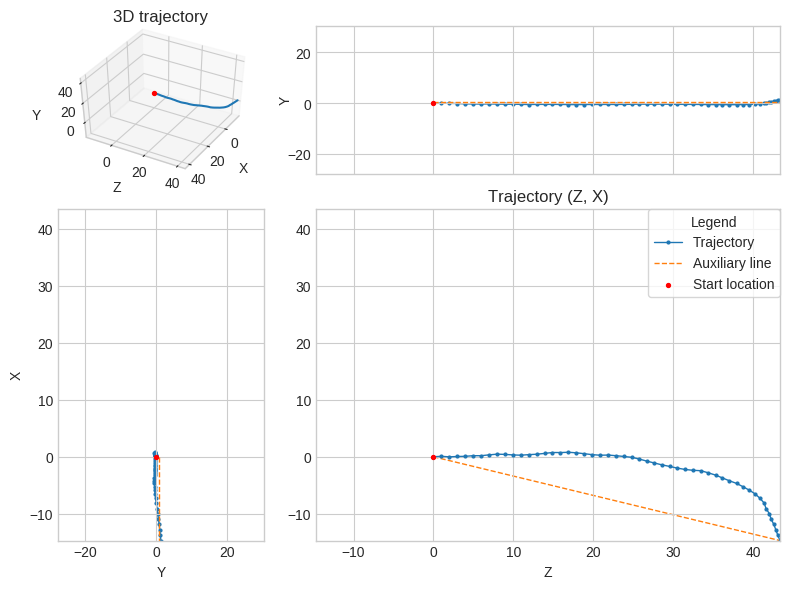
GitHub Link Extracted features from images using vehicle’s camera setup to find matches, implemented match filtering by thresholding distance Estimated the camera motion between subsequent photographs using PnP & Essential Matrix Decomposition to build trajectory |
|
GitHub Link Reconstructed 3D image using 10 2D-image sequences of Dinosaur dataset taken from multiple angles with same camera calibration |
|
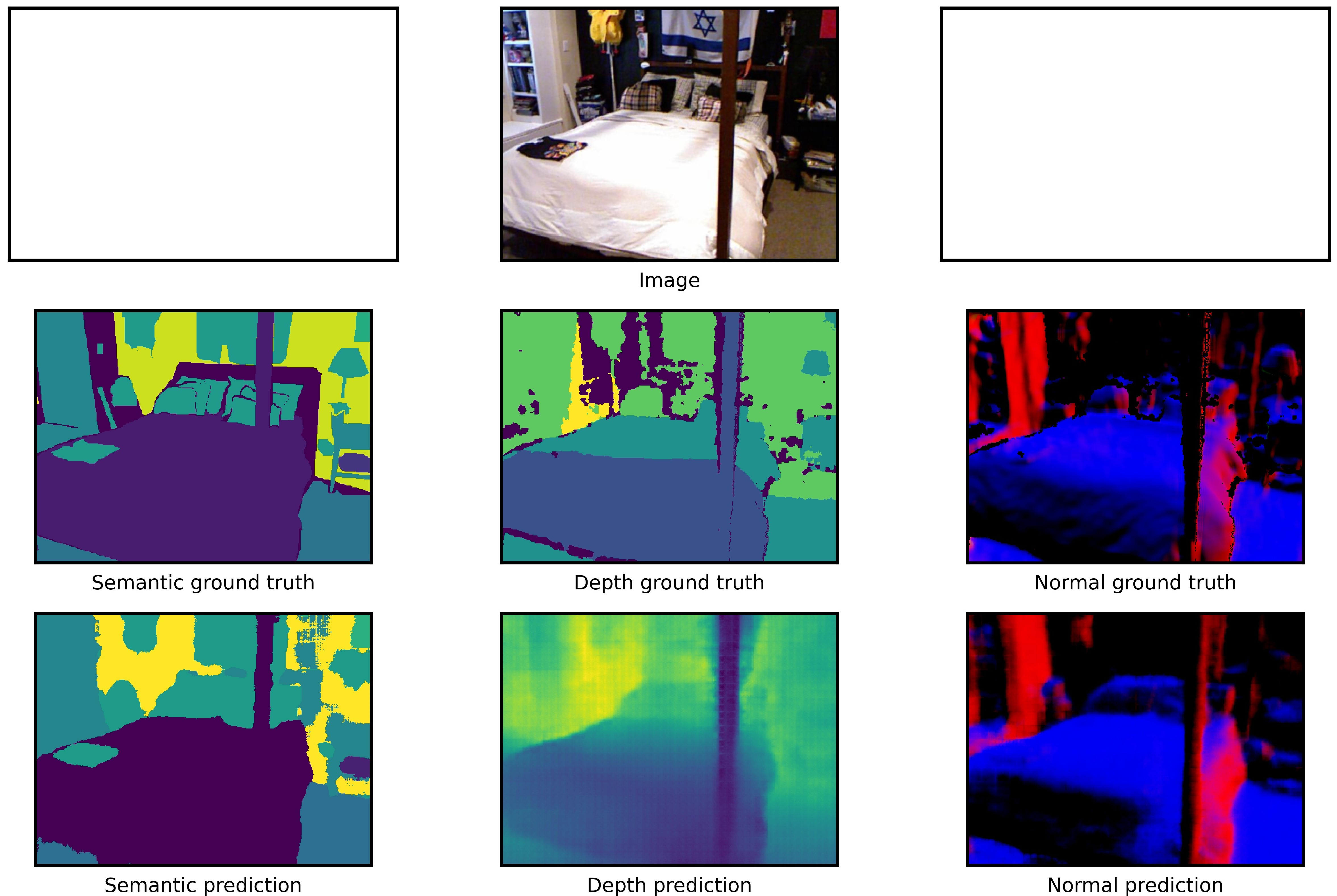
GitHub Link Developed unified encoder-decoder architecure using PyTorch to perform depth & surface estimation with semantic segmentation Performed experiments using VGG16 & ResNet versions as encoders with VGG16 offering good trade-off between peformance & speed |
|
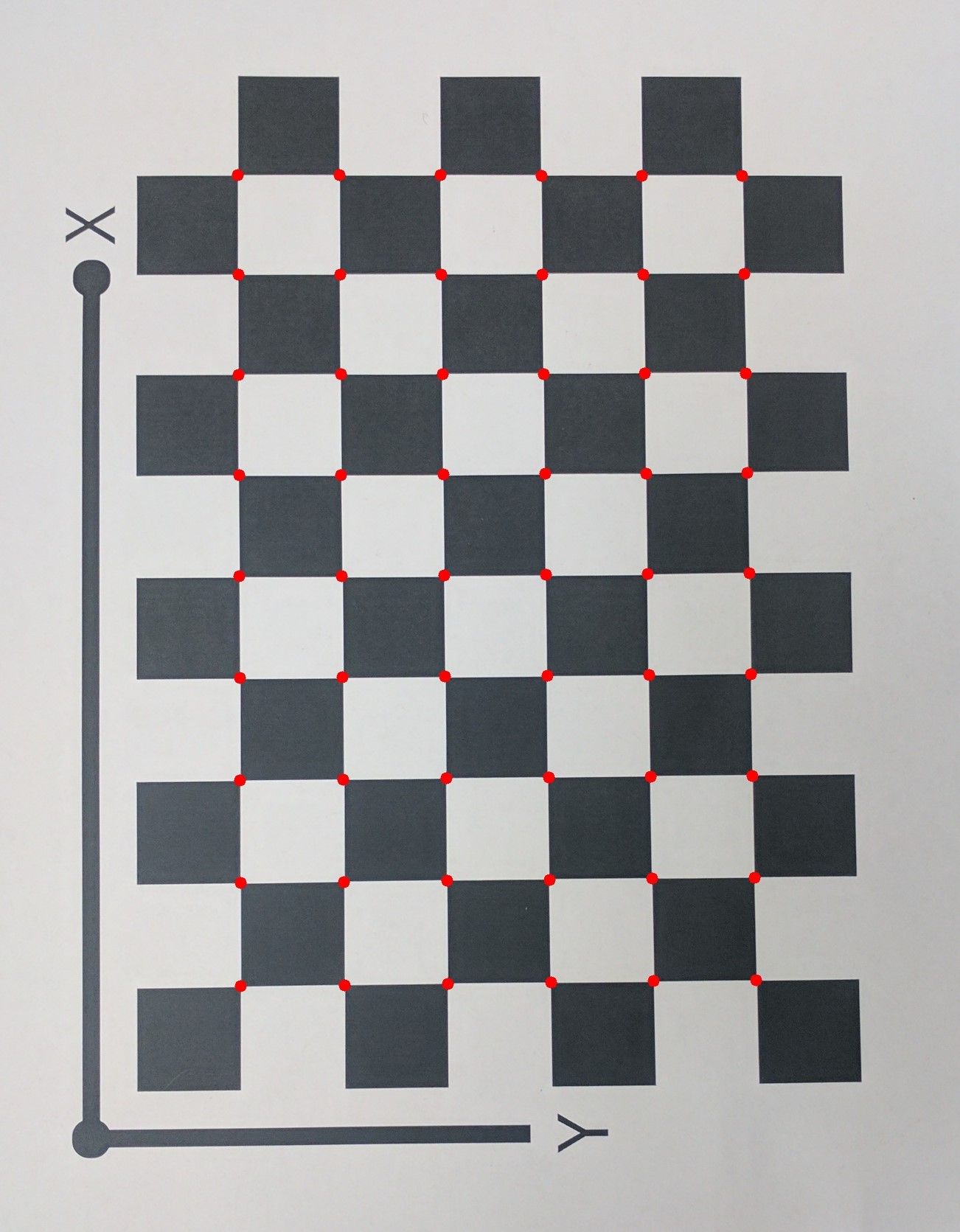
GitHub Link Executed Zhang Camera Calibration, utilized eigen decomposition to solve a homogenous system of linear equations and maximum likelihood estimation (MLE) for optimizing calibration parameters The mean re-projection error post optimization was close to 0.5 pixels |
|
Presentation Performed HOG feature extraction on labeled training image set, trained Linear SVM classifier, implemented sliding-window technique, created heatmap to follow detected vehicles and estimated bounding box on detetcted vehicles Compared results with Yolo Used max IoU & least false positives as comapring parameters |

|
GitHub Link Stitched images by projecting images onto a cylindrical surface, estimated homography between image pairs using feature correspondences Used RANSAC for removing the outliers among the feature matches |
|
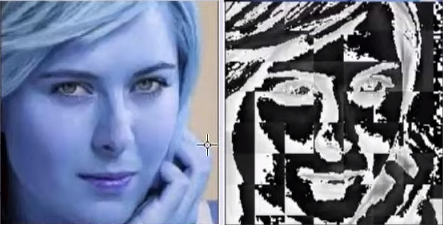
GitHub Link Created end to end pipeline, used Opencv library for face & eyes detection and wavelet transforms for feature engineering Built model using SVM, logistic regression & random forest, fine-tuned model using gridsearchcv F Score: SVM: 84.12%, Random Forest: 70.6%, Logistic regression: 80.95% |
|
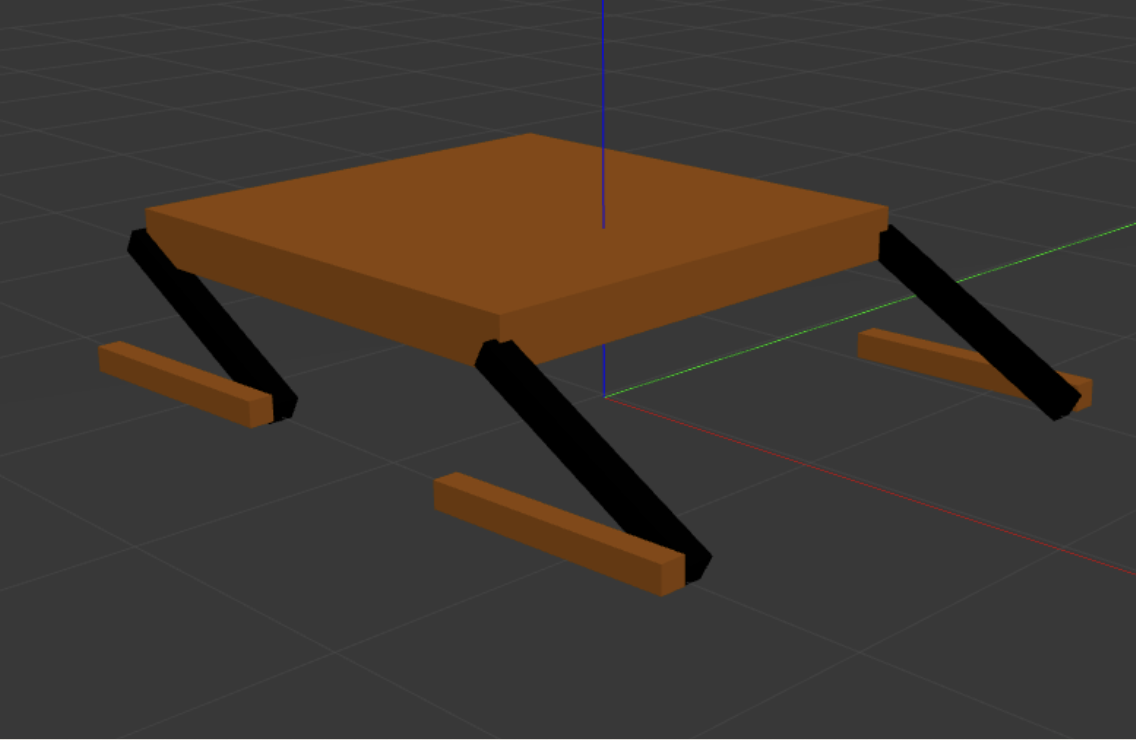
GitHub Link CImplemented a decentralized control system for individual legs of the quadruped based on a hybrid zero dynamics-based model to show the working of different gaits Deployed a robust sliding mode control algorithm to control 8-DoF quadruped on a Gazebo platform via ROS |
Activities & Achievements |

|
Integrated the robust manipulator with a soft robotic gripper for precise and gentle handling of delicate crops and to deliver exceptional results in autonomous fruit, vegetable, and flower harvesting Combined computer vision, dynamics, controls, motion planning, and soft robotics to create durable robots capable of withstanding the challenges of outdoor agricultural environments Won accolades in the AMD Robotics Innovation 2023 Challenge For details of design, please contact via Email Media Coverage |

|
Developed a Group 3 size unmanned Vertical Take-Off and Landing(VTOL) Aircraft that achieves high-speed forward flight (relative to current VTOL aircraft) and efficient hover through the use of novel reconfigurable propulsive and lifting devices for mega-city type environments Participated in the American Helicopter Society 35th International Student Design Competition (2018) and was the only Indian team to win this competition since 2011 in the undergraduate category, that too in its first attempt Executive SummaryMedia Coverage |
Teaching Experiences |
|
|
|
|
Last updated: June 21, 2025 |